
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| 7 | 8 | 9 | 10 | 11 | 12 | 13 |
| 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| 21 | 22 | 23 | 24 | 25 | 26 | 27 |
| 28 | 29 | 30 | 31 |
- 헬셀
- 드론시장
- 입문자드론
- 드론
- 드론보험
- DJI
- 초경량비행장치실기시험
- 수색드론
- 농업용드론
- 세서스K
- 비행컨트롤러
- 전문가용드론
- dronesoccer
- 산업용드론
- PIX4D
- 드론교육원
- 드론추천
- HELSEL
- rededge-mx
- 드론비행
- MicaSense
- 측량소프트웨어
- Drone
- 미카센스
- 2021드론쇼코리아
- 드론교육
- 드론신고
- 드론실기시험
- 드론조종자격
- 드론측량
- Today
- Total
드론산업을 선도하는 대표기업 헬셀
[DJI] 항공측량짐벌 젠뮤즈 Zenmuse P1 비행테스트 결과 궁금하시죠? 본문
안녕하세요. 드론의 리더 (주)헬셀 입니다.
오늘은 젠뮤즈 P1를 비행테스트한 결과에 대해서 안내해드리도록 할게요. 많은 분들이 P1에 대해 문의를 주시는데 어떠한 결과를 보여줬는지에 대해 자세히 설명해드리겠습니다. 다소 어려운 내용이 포함되어 있어 기존 드론에 대한 정보가 있으신 분들에게 도움이 되실테니 참고 해주세요 :)
먼저 P1에 대한 설명을 먼저 드리도록 하겠습니다. P1은 유연한 풀 프레임 사진 측량으로 효율성 있는 업무를 진행합니다. 또한 3축 안정화 짐벌에 교체 가능한 고정 초점 렌즈와 풀 프레임 센서를 통합하는데요. 사진 측량 비행 임무를 위해 설계 되었으며 효율성과 정확성을 완전히 새로운 차원으로 끌어 올렸습니다.
테스트 목적
GNSS 측정기로 대공표지판 (GCP_Ground Control Point)를 설치하고, 동일한 지역을 팬텀4 RTK로 측정한 데이터를 대조군으로 P4 RTK 70m, M300 + P1 Camera 100m 200m 300m 촬영 데이터를 서로 비교하는 것으로 젠뮤즈 P1의 데이터 정확도 체크와 비행의 효율성을 판단하였습니다.
비행테스트 지역 및 비행계획
비행 승인과 촬영 허가를 받은 후, 여주시 이포보 인근 공터에서 진행하였습니다. 촬영 대상지의 비행 계획 70m 100m 비행의 경우 0.2㎢의 면적, 200m 300m 비행은 0.35㎢를 대상지로 하였습니다.

기준점 선정 및 측정



이렇게 공공 기준점측량 방법의 경우 평면과 표고로 나누어 두 가지 방법으로 수행해야 하고, 평면 기준점은 네트워크 RTK 측량 또는 그에 준하는 측정 방식을 사용하고, 표고 기준점은 직접 수준 측량 방식으로 진행해야 합니다.
무인비행 장치 촬영
비행 기체와 촬영고도 등의 데이터는 아래 표를 참고해 주세요. 기체 / 카메라의 화각 차이를 고려하여 동일 높이로 환산하는 경우, 기존의 2000만 화소의 카메라의 1/2 GSD를 확보하였습니다.

종횡 중복도를 75%로 각각의 고도에서 총 4번 비행을 진행한 결과 입니다.



촬영 성과품 처리과정
이렇게 촬영을 통해서 획득된 영상 자료와 지상기준점 및 검사점의 결과물을 이용하여 최종 성과물은 PointCloud / Orthomosaic, Digital Surface Model을 생성하였습니다. 그리고 Pix4Dmapper를 통해 프로세싱을 진행했습니다.
- Pix4Dmapper의 단계별 프로세싱 과정 -
| 1단계 | - 프로세싱 과정에서 타이 포인트 생성 및 영상을 매칭 - 번들 조정법을 통해 Sparse Pointcloud 매칭 포인트를 생성한 후, 지상 기준점을 입력하고 재 최적화 과정을 통해 데이터를 정렬 |
| 2단계 | - 1단계에서 생성된 사진의 위치와 Sparse Pointcloud를 바탕으로 Structure From motion방식의 알고리즘을 통해 점구름을 생성 |
| 3단계 | - 2단계에서 생성된 점구름 (Densified Pointcloud)로 DSM (Digital Surface Model), 정사영상 (Orthomosaic)생성 |
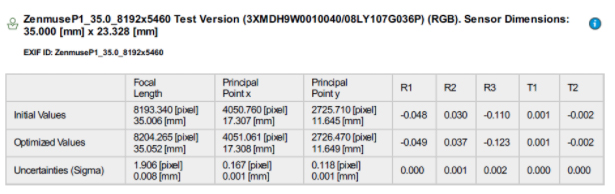
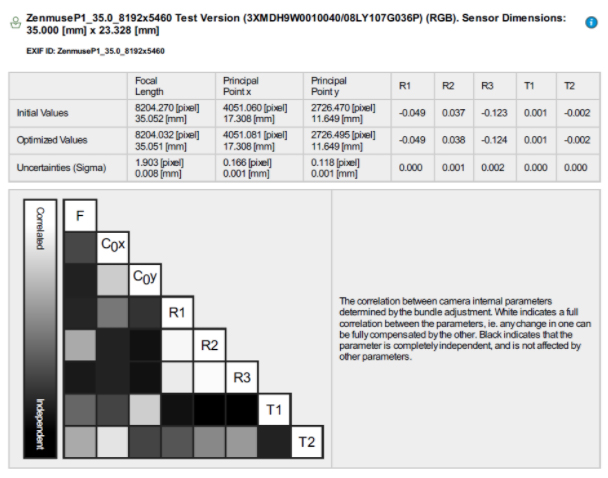
카메라 파라미터 값 입력
Pix4D 소프트웨어는 외부 파라미터와 내부 파라미터를 바탕으로 프로세싱을 진행하게 되어 있는데요. 파라미터 값이 차이가 있거나, 없다고 하더라도 사진상의 특징을 잡아 맵핑 모델링이 가능합니다. 하지만, 더 정확한 프로세싱을 위해서라면 외부, 내부 파라미터가 정확한 값으로 입력되는 게 좋겠죠? 촬영 시 사용한 팬텀4 RTK 경우, 카메라의 제원 값과 렌즈의 방사 및 접선 왜곡 값이 EXIF 상에 기재가 되어 있습니다. 그래서 프로세싱 시, 그 값을 사용하였습니다.

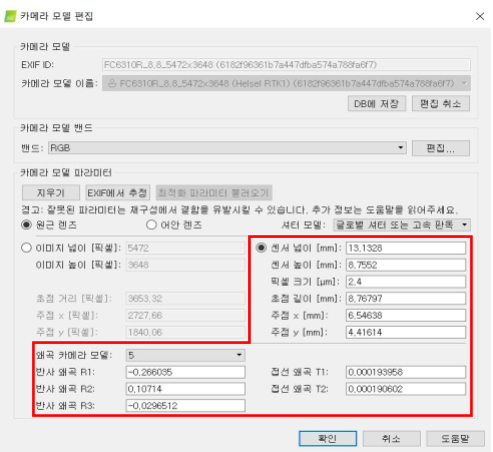
테스트비행을 한 Zenmuse 젠뮤즈 P1의 경우는 EXIF 상에 카메라 제원 값, 경도, 위도, 고도 및 촬영 시 자세 값 그리고 사진을 취득할 당시의 Fix, Float, Single의 RTKFlag 값과 수평과 수직의 정확도 값 등으로 Pix4Dmapper에서 사용할 수 있었지만 아쉽게도 아직 렌즈에 대한 왜곡 값이 기재되어 있지 않은 걸 확인할 수 있었습니다.
렌즈의 기존 제원만으로도 프로세싱이 가능하지만, 렌즈 캘리브레이션을 통한 카메라 렌즈의 정확한 제원을 입력하여 데이터의 정밀도를 높여보았습니다.캘리브레이션 과정은 캘리브레이션 패턴(체스보드) 을 이용해서 소프트웨어를 통해 카메라에 대한 제원을 결정한 후 지상기준점을 통한 수정 제원을 만드는 방법이 일반적이나, 이번에는 지상기준점 데이터를 통한 카메라와 렌즈 제원을 수정하는 방법을 사용했습니다.
렌즈 캘리브레이션 순서
1. 프로세싱 진행하기 전, 지상 기준점을 적용시키고 1단계 프로세싱을 진행
2. 처리 후, Optimization Report 수정된 값을 호가인하여 그 값으로 젠뮤즈 Zenmuse P1 카메라 제원을 다시 입력
3. 수정된 제원으로 1단계 프로세싱 후, 지상 기준점을 입력 후 카메라 Optimization을 확인하여 초기값과 수정한 값의 오차를 확인합니다. 5%이내 성과가 나온다면, 그 성과를 활용합니다.
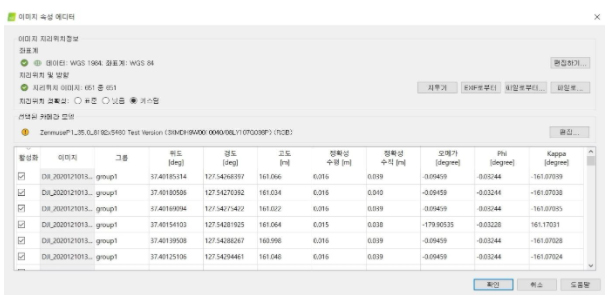
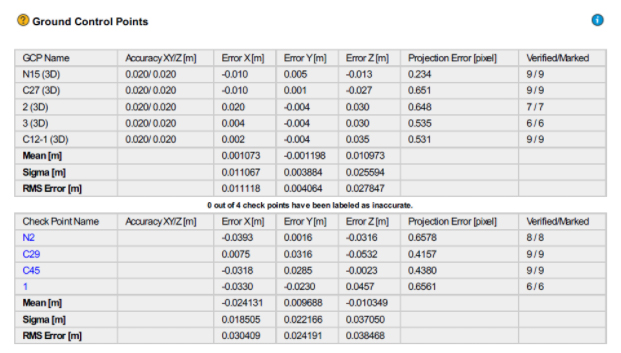
기준점과 검사점의 RMS 오차 비교
데이터의 비교 및 정확도 검측은 먼저 품질 보고서 상에 나온 GCP와 체크포인트로 각 기준점 상의 RMS 오차를 비교하였습니다.
팬텀4 RTK의 경우, 모든 기준점을 지상기준점으로 하여 프로세싱을 진행하였고, P1의 경우, 총 9개 기준점 중 5개는 지상기준점, 4개는 검사점 (일부 3개)으로 사용하였습니다.
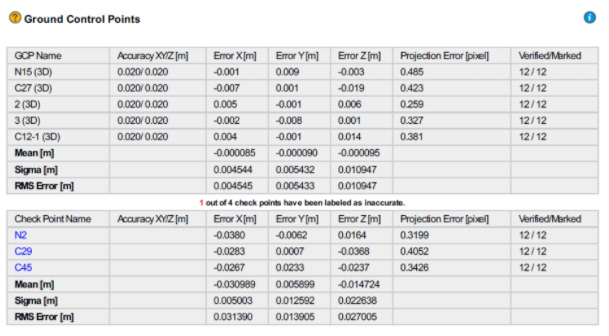
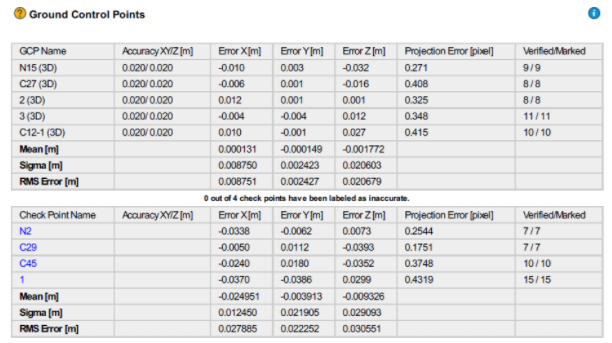
각 데이터 평균 RMS 오차 및 최대값
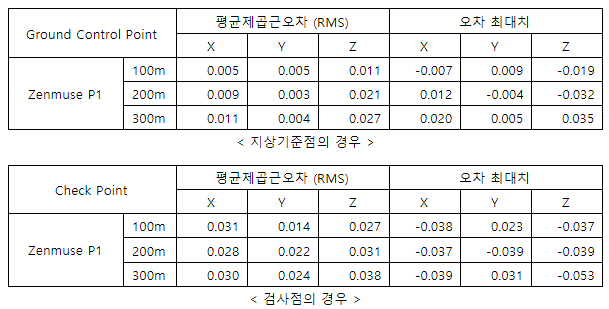
촬영고도가 높아짐에 따라 (GSD가 높아짐) 평균제곱근 오차와 각 방향의 오차 최대치가 상승하는 것을 알 수 있습니다. VRS 방식으로 평면과 표고의 기준점 데이터를 측정했을 때 생기는 오차를 감안하더라도 모든 데이터는 공공측량 성과 심사 기준인 10cm 이내 들어오는 것을 알 수 있습니다.
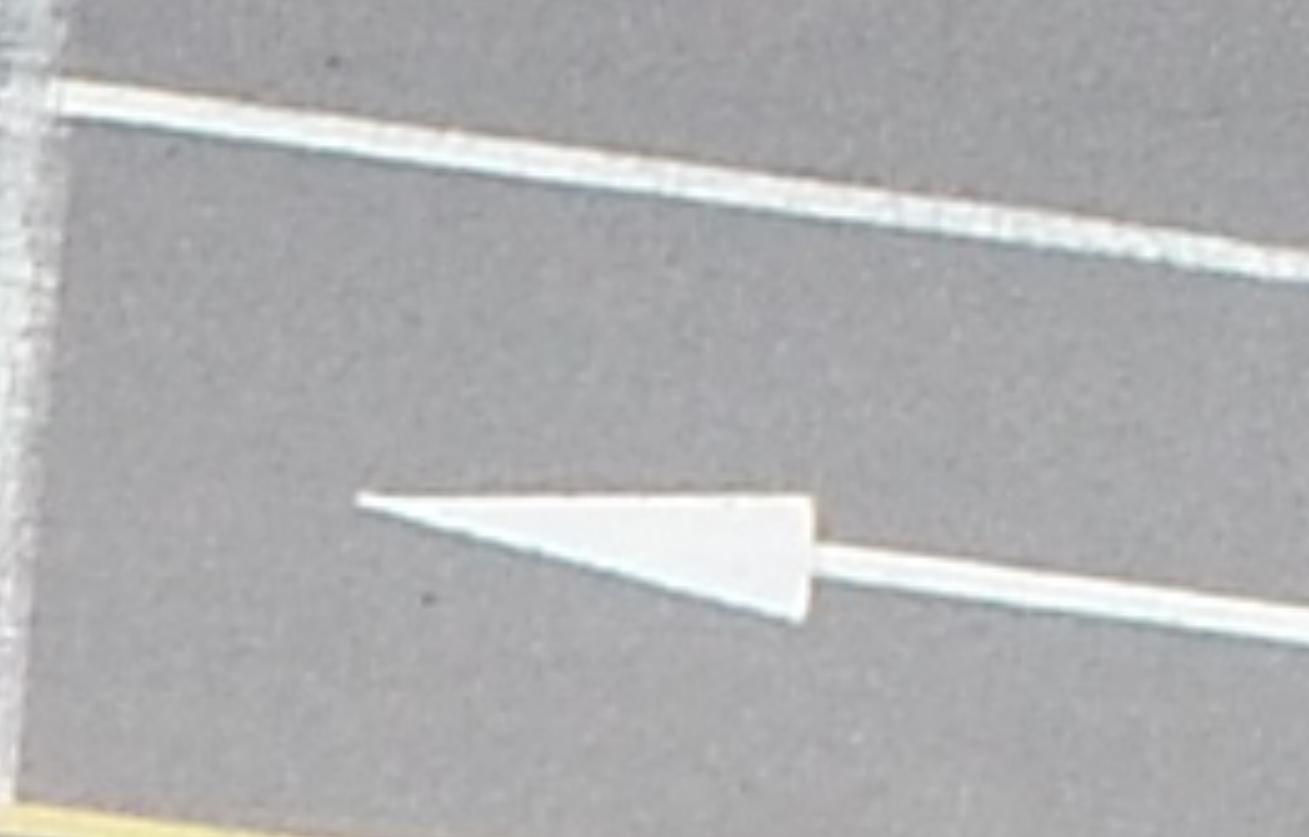
DSM 수치 표면 모델에서의 높이 정확도 비교
GCP를 마킹하는 과정에서 오차, 품질이 떨어지는 사진이 있는 경우, 실제 데이터를 검측할 때 품질 보고서상의 수치보다 수직적인 위치에 대한 오차량이 벌어질 수 있습니다. (수평적 오차는 크게 변화 없음)

Digital Surface Model의 데이터와 기준점의 데이터를 통해 한 번 더 수직적인 위치값을 비교 분석한 사진입니다.
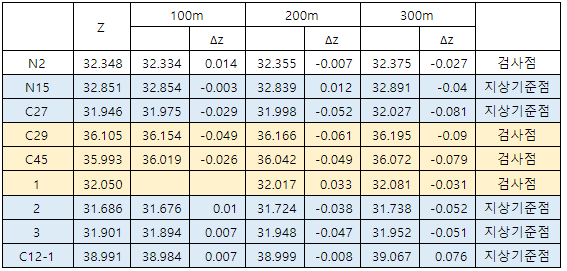
위의 표를 보시면, Z값의 오차가 100m / 200m / 300m에 따라 다른 것을 알 수 있습니다. 100, 200m에 비해 300m에서 높은 수치를 보였지만, 10cm 이내 데이터임을 알 수 있습니다.
Zenmuse P1, DJI에서 출시한 측량 전용 4500만 화소 풀 프레임 카메라
기존 측량용 드론의 경우 풀 프레임을 장착한 여러 기체가 이미 나왔지만, Zenmuse P1은 M300이라는 안정적인 비행을 할 수 있는 기체에 마운트 되어 비행이 손쉽게 가능하고, GNSS와 Ntrip (RTK) 정보를 동시에 취득 저장이 되어
지오태깅과 같은 후처리 과정을 하지 않고 간단하게 사진측량 소프트웨어에서 사용할 수 있는 장점이 있습니다.
팬텀4 RTK로 작업을 하는 경우 10cm 이내의 측량성과를 얻기 위해서는 150m 이하 고도에서 작업을 해야 합니다.
같은 시스템의 M300으로 환산한다면 300m 고도에서 10cm 이내 측량성과를 얻을 수 있을 것입니다. 테스트한 결과 300m 고도에서의 비행 역시, 문제없이 데이터를 취득할 수 있는 것으로 나왔습니다.
M300과 P1 카메라의 조합은 현재 측량 및 건설업계에서 가장 많이 사용하는 시스템인 팬텀 4 RTK 드론의 완벽한 상위 호환 제품이 될 것으로 생각됩니다.
이상으로 젠뮤즈 Zenmuse P1의 비행테스트 그 결과, 포스팅을 마치도록 하겠습니다.
추가 궁금한 사항은 저희 헬셀로 문의주세요. 감사합니다.

- 헬셀 공간정보팀 -
담당자 권세호 팀장 070-7424-5127
담당자 박종섭 대리 070-7424-4117
'DJI > 산업용드론' 카테고리의 다른 글
| [매트리스300 RTK] 산림환경조사용 드론 (산불방지, 구조자 수색 등) (0) | 2020.12.18 |
|---|---|
| [드론감시˙단속] 국립공원공단 - 다도해 해상국립공원 무인섬 일대 (2) | 2020.10.30 |
| [단속드론 사례 - dji 인스파이어2] 재개발 지역 비산먼지, 소음 등 공사장 단속 (0) | 2020.10.28 |
| [순찰드론 사례 - MAVIC2 ENTERPRISE] 해양경찰서 비지정해변 사각지대 해소 (2) | 2020.09.10 |
| [소방드론 사례 - M300RTK] 화재 현장에서 '드론'활용하여 화재 진화 (2) | 2020.09.07 |



